 地質調査業、建設コンサルタント業、測量業
地質調査業、建設コンサルタント業、測量業
地球と共に、社会と共に
持続可能な未来に向かって
- 新着情報
- お知らせ
- 技術情報
- 採用情報
弊社は2050年カーボンニュートラル社会実現に貢献するため、安全かつ大規模で効率的な二酸化炭素地中貯留技術の実現に向けて、研究開発を一層加速させることを目的として、二酸化炭素地中貯留技術研究組合に組合員として加入致しました。
採用情報を掲載致しました。
幕張メッセ国際展示場で開催されますJpGU2022 (期間:5月22日~5月26日)にブース展示致します。(ブース番号A23)
当社が共同研究で行った 海洋CSEM探査技術の国内内製化に向けた実証実験に関して寺西他 が 第144回物理探査学会講演会 優秀発表賞 を受賞致しました。
弊社は2050年カーボンニュートラル社会実現に貢献するため、安全かつ大規模で効率的な二酸化炭素地中貯留技術の実現に向けて、研究開発を一層加速させることを目的として、二酸化炭素地中貯留技術研究組合に組合員として加入致しました。
幕張メッセ国際展示場で開催されますJpGU2022 (期間:5月22日~5月26日)にブース展示致します。(ブース番号A23)
当社が共同研究で行った 海洋CSEM探査技術の国内内製化に向けた実証実験に関して寺西他 が 第144回物理探査学会講演会 優秀発表賞 を受賞致しました。
採用情報を掲載致しました。
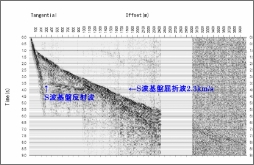
物理探査で人と地球をつなぐ
私たちは、反射法地震探査を基軸に
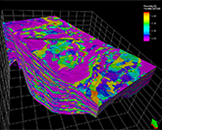
物理探査手法を用いた三次元地下構造や物理的特性、
その時間的な変化の可視化を通じて、
カーボンニュートラル社会への貢献や、
エネルギー・地震防災・環境問題への
ソリューションを提供します。



事業分野
低炭素社会の実現と活力ある社会システムの構築に貢献するとともにエネルギー・
環境問題へのソリューションを提案します。


技術サービス
豊かな経験と優れた地球科学総合力に基づく探査技術サービスの提供を通じ、
お客様の課題に対し、様々なアプローチによって解決へと導きます。







研究開発
地球環境分野、学術・防災分野、エネルギー分野における新しいニーズに応えるべく、
研究開発を進めています。





